
SLAM 算法复现记录:SLAM2REF
SLAM2REF:一开始是想着这个用来做真值的
1. 项目基本信息
- 系统:Ubuntu 20.04
- ROS 版本:Noetic
- 项目地址:https://github.com/MigVega/SLAM2REF
- 这是我的复现过程记录,并非教程,因此会有一些不必要的操作
2. 算法复现
在 cmake .. 时报错
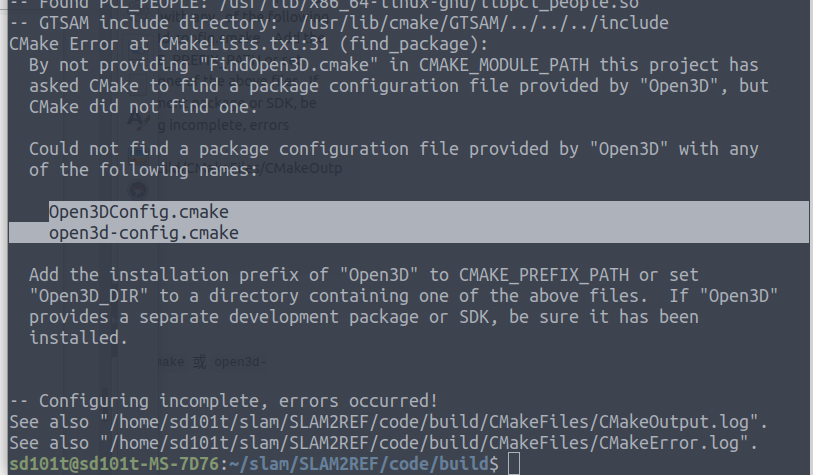
之前没有安装Open3D。在 SLAM2REF/.github/workflows/cmake-single-platform.yml 文件中可以看到安转办法。
在配置时,cmake .. 时报错:cmake版本太低
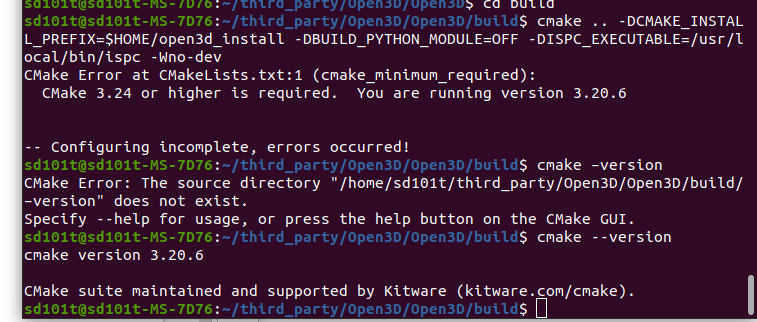
更新cmake: 源码安装:https://github.com/Kitware/CMake 我直接选择安装v4.0.2,旧版的不卸载, 运行安装脚本(指定安装路径到用户目录)
chmod +x cmake-4.0.2-linux-x86_64.sh
./cmake-4.0.2-linux-x86_64.sh --skip-license –prefix=$HOME/cmake-4.0.2
#设置环境变量(让终端使用新版本,关闭这个终端后使用的还是旧的cmake)
export PATH=$HOME/cmake-4.0.2/bin:$PATH
cmake --version # ✅ 应显示 cmake version 4.0.2
# 如果想永久使用,把这一行加进 .bashrc:(我没有加,)
echo 'export PATH=$HOME/cmake-4.0.2/bin:$PATH' >> ~/.bashrc
source ~/.bashrc
还需要ISPC(这步不需要) 在上面说的 SLAM2REF/.github/workflows/cmake-single-platform.yml 这个文件中也可以找到对应的安装步骤 如果使用ispc会卡在这– Fetching ISPC compiler很久 就去掉了 使用:
cmake .. \
-DCMAKE_INSTALL_PREFIX=$HOME/open3d_install \
-DBUILD_PYTHON_MODULE=OFF \
-DBUILD_ISPC_MODULE=OFF \
-Wno-dev
安装完open3d后继续cmake .. 依旧报错
有两种方法
1修改cmakelists
2、cmake .. -DOpen3D_DIR=$HOME/open3d_install/lib/cmake/Open3D 然后运行cmake ..
运行的话:
sd101t@sd101t-MS-7D76:~/slam/SLAM2REF/code/build$ ./slam2ref