SLAM 算法复现记录:FAST-LIVO2
FAST-LIVO2:雷达imu视觉融合
1. 项目基本信息
- 系统:Ubuntu 20.04
- ROS 版本:Noetic
- 项目地址:https://github.com/hku-mars/FAST-LIVO2
- 这是我的复现过程记录,并非教程,因此会有一些不必要的操作
2. 算法复现
我在安装时不选择安装在默认路径,而是自定义路径(一般安装在默认路径最方便),我之前已经下载过另一版本的 cmake .. -DCMAKE_INSTALL_PREFIX=/home/sd101t/third_party/Sophus/install
在编译make sophus时出现错误:
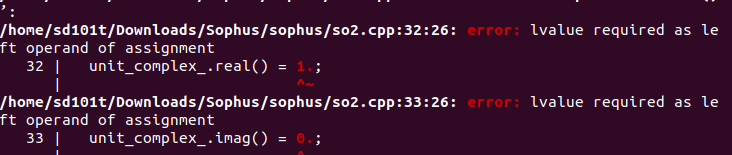
在对应文件下修改为:
unit_complex_.real(1.);
unit_complex_.imag(0.);
解决办法:参考: https://blog.csdn.net/weixin_35732969/article/details/88947517
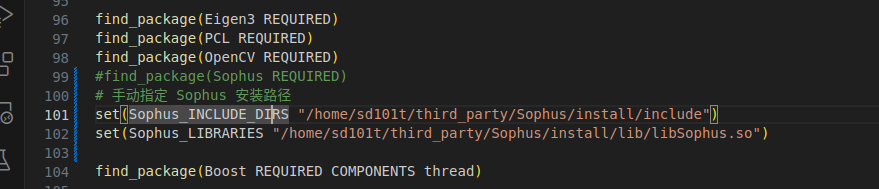
因为我sophus下载到自定义路径,需要修改cmakelists内容,修改为:根据自己的具体路径来实施,根据自己的具体路径来实施